Kavitation ist ein weithin bekanntes Problem, das bei Pumpen auftritt und zu erheblichen Schäden und anderen unerwünschten Folgen führt. Um Schäden zu vermeiden, sollte eine Pumpe auf Bildung und Auftreten von Kavitation überwacht werden. In diesem Artikel werden verschiedene Optionen zur Überwachung und zum Schutz der Kavitation für jede Anwendung beschrieben.
Kavitation
Kavitation ist die Bildung von Luftblasen in einer Pumpe infolge eines Druckabfalls der fließenden Flüssigkeit. Wenn sich diese Luftblasen bewegen, steigt der Druck an, was zur Implosion der Luftblasen führt. Die Implosion der Luftblasen auf der Oberfläche des Pumpengehäuses oder Laufrads führt zu Schäden und Leistungsproblemen. Es werden zwei Arten von Kavitation unterschieden:
- Saug Kavitation kann auftreten, wenn sich eine Pumpe unter Niederdruck- oder Hochvakuumbedingungen befindet. Da die Pumpe nicht genügend Durchfluss erhält, bilden sich am Laufrad Blasen. Wenn sich diese Blasen auf die andere Seite (Auslass) der Pumpe übertragen und mit der Flüssigkeit komprimiert werden, implodieren sie.
- Entladungskavitation kann auftreten, wenn der Druck während der Entladung zu hoch ist. Aufgrund des hohen Drucks wird es für die Flüssigkeit schwierig, die Pumpe zu verlassen, wodurch sie in der Pumpe zirkuliert. Dies kann ein Vakuum und die Bildung von Luftblasen verursachen, was wiederum sowohl das Laufrad als auch das Pumpengehäuse beschädigt.
Langzeitkavitation führt zu Pumpenausfällen, z. B. zur Zerstörung des Pumpengehäuses und des Laufrads. Andere Auswirkungen der Kavitation sind übermäßiger Lärm und Energieverbrauch.

Konfigurationen zur Überwachung der Kavitation
Es gibt verschiedene Konfigurationen, um die Kavitation überwachen zu können. Welche Konfiguration am besten zur Anwendung passt, hängt von der Anwendung und / oder den Kundenanforderungen ab. Es werden drei Konfigurationen unterschieden:
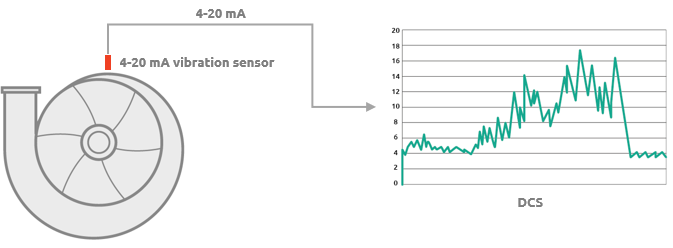
1. 4-20mA sensor
Bei Verwendung eines 4-20-mA-Sensors muss der Kunde den gewünschten Grenzwert ermitteln und in der DCS / PLC konfigurieren. Das DCS / PLC wird dann verwendet, um einen Alarm zu erzeugen, wenn dieser Grenzwert überschritten wird. Zur Ermittlung des Grenzwertes muss in der Pumpe eine Kavitationssituation entstehen. Ein großer Nachteil von 4-20-mA-Sensoren besteht darin, dass sie einen Gesamtwert der Schwingungen liefern, wodurch es unmöglich wird, Kavitation von anderen Faktoren zu unterscheiden, die übermäßige Schwingungen verursachen können. Eine typische Konfiguration bei Verwendung eines 4-20-mA-Sensors sieht wie folgt aus:
2. Programmierbarer Sender
Wie bei der oben genannten Konfiguration muss der Kavitationstest vom Kunden durchgeführt werden. Die Häufigkeit, mit der Kavitation auftritt, wird bestimmt und dann zum Filtern der Daten verwendet. Der gewünschte Alarmwert wird an eine DCS / SPS gesendet oder zum Auslösen eines Relais verwendet. Ein Standard-Beschleunigungsmesser mit 100 mV / g sendet das Rohvibrationssignal an den Sender. Der Sender verarbeitet dieses Signal und liefert zwei 4-20-mA-Signale, die über zwei verschiedene Frequenzbänder berechnet werden können. Dies ermöglicht die Unterscheidung zwischen Schwingungen infolge von Kavitation und solchen, die durch andere Abweichungen wie Unwucht und Lagerschäden verursacht werden. Eine typische Konfiguration sieht wie folgt aus:
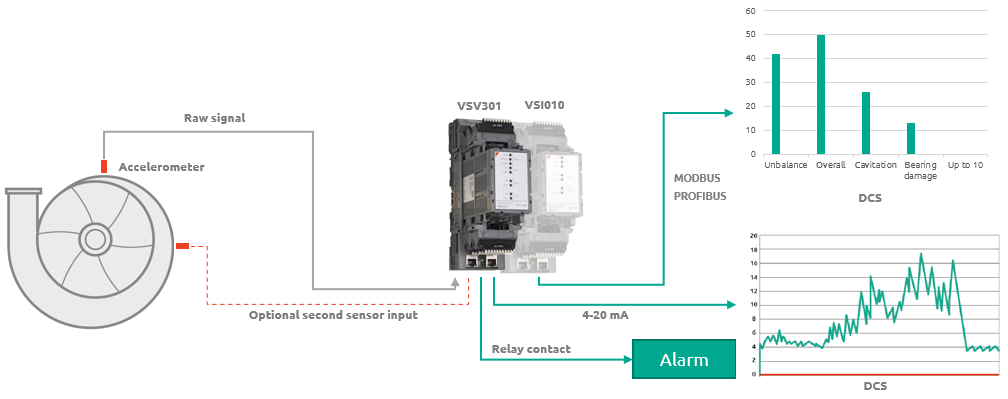
3. Zustandsüberwachungssender (VibroSmart)
Diese Konfiguration verwendet dieselben Sensoren wie die Senderkonfiguration. Wie bei der vorherigen Konfiguration wird das 4-20-mA-Signal innerhalb einer frei konfigurierbaren Frequenz berechnet. Es wird jedoch ein fortgeschrittener Sendertyp verwendet. Über Modbus können bis zu 10 verschiedene berechnete Ausgänge pro Signal erzeugt werden. Dies ermöglicht die Unterscheidung zwischen bestimmten Maschinenfehlern im Steuerungssystem. Einige Maschinenfehler haben einen bestimmten Frequenzbereich, der unabhängig berechnet werden kann. Dies ermöglicht es, Abweichungen im Schwingungsverhalten direkt einem bestimmten Fehler zuzuordnen und sofort die erforderlichen Maßnahmen einzuleiten. Ungefilterte Daten können auf einem lokalen PC gespeichert oder über ein Netzwerk gesendet werden, wodurch eine Fernüberwachung des Zustands ermöglicht wird.
Eine typische Konfiguration sieht wie folgt aus: