In het verleden werden de overspeed-bewakingssystemen op turbines veelal ontworpen door de OEM van de turbine zelf, als onderdeel van het mechanische systeem. Deze mechanische bewakingssystemen zijn met name op middelgrote machines nog steeds in gebruik. Elektronische systemen bieden echter significante voordelen en worden steeds toegankelijker. In dit artikel worden de voordelen van elektronische bewaking tegenover mechanische overbewaking toegelicht.
Hoe werkt een mechanische overspeed-bewaking?
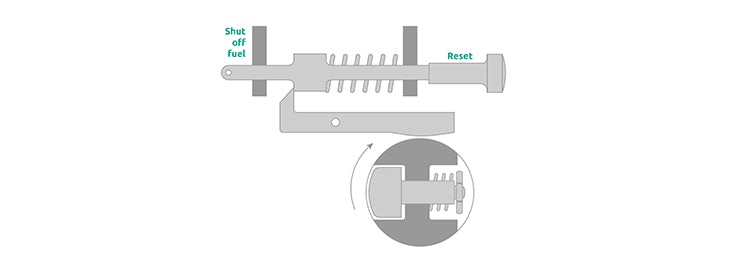
Om het verschil tussen de twee vormen van bewaking te begrijpen is het belangrijk te weten hoe mechanische overspeed-bewaking werkt. Mechanische overspeed-bewakingssystemen werken op basis van een gewicht aan een veer waarvan de veerkracht bekend is. Door de centrifugale kracht als gevolg van de as-rotatiesnelheid, wordt de veer steeds verder uitgerekt en beweegt een gewicht naar buiten. Zolang de rotatiesnelheid nog binnen de ontwerpspecificaties valt zal de veer niet te ver uitrekken waardoor het gewicht niet zal uitsteken. Echter, wanneer de snelheid te hoog wordt zal het gewicht naar buiten lopen waardoor het de trip bolt zal raken. Hierdoor schiet de pin los en zal de trip in werking gaan.
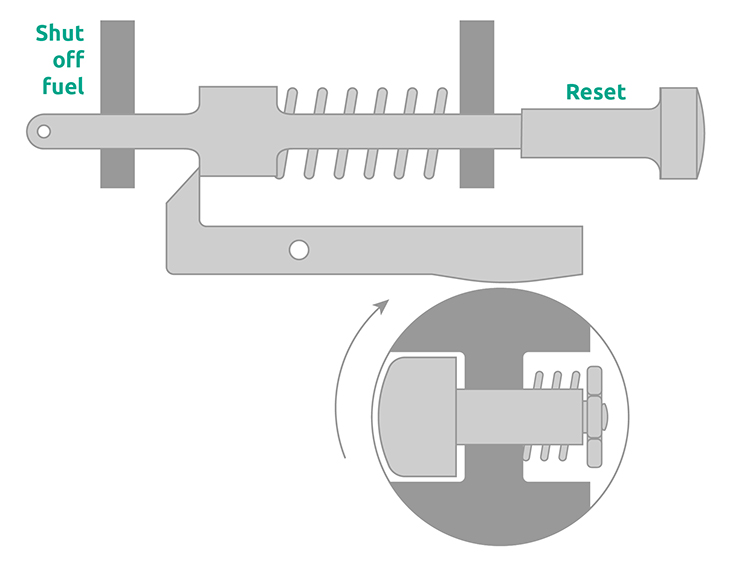
Schematische weergave van de werking van een mechanisch overspeedbewaking-systeem.
Hoe werkt elektronische overspeed-bewaking?
Elektronische overspeed detectie bestaat uit een tandwiel of andersoortig meetoppervlak, speedsensoren en een meetsysteem met triplogica en relaisuitgangen De speedsensoren kijken naar het meetoppervlak en geven een sinus of blokgolf signaal, die het meetsysteem ziet als pulsen. Het meetsysteem telt vervolgens de tijd tussen de pulsen om de rotatiesnelheid te bepalen. Middels de triplogica worden de relaisuitgangen aangestuurd. Om de veiligheid enerzijds en de beschikbaarheid anderzijds te vergroten worden deze bewakingssystemen vaak in redundante voting structuren opgebouwd.
Waarom overstappen naar elektronische overspeedbewaking?
Het overstappen van mechanische overspeedbewaking naar elektronische overspeedbewaking heeft significante voordelen. Verifieerbare veiligheid is het voornaamste argument. Ter illustratie: Waar mechanische overspeedbewaking-systemen moeten worden getest door de machine daadwerkelijk in overspeed te brengen (met alle risico’s van dien!), kan een elektronisch overspeedbewaking-systeem worden getest door overspeed te simuleren. Naast het wegnemen van veiligheidsrisico’s is een gesimuleerde test sneller en eenvoudiger uit te voeren.
In dit overzicht maken we de vergelijking tussen beide vormen van bewaking:
| Mechanische overspeed trip | Elektronisch overspeed trip |
|---|---|
| Onnauwkeurige trip-waarde bepaling door onnauwkeurige tegenkracht-waarde van veer (+/-50 rpm) | Zeer nauwkeurige tripwaarde bepaling |
| Trip-waarde verschuift langzaam als gevolg van materiaal moeheid van de veer | Trip-waarde zal niet wijzigen |
| Geen mogelijkheid tot gebruikersinterface | Geeft mogelijkheden tot DCS interface |
| Moet bevestigd zijn aan as of mechanische hendel | Geen fysiek contact met as of mechanische hendel nodig |
| Ophoping van smeerolie kan de werking van de mechanische trip blokkeren | Ophoping van smeerolie heeft geen effect op de tripfunctie |
| Kan niet worden getest, behalve wanneer deze is losgekoppeld van de aangedreven apparatuur, waarvoor afschakeling vereist is | Veilig mogelijkheid om tripfunctie te testen door middel van overspeed-simulatie met behulp van een frequency generator |
| Overspeed benodigd om trip te activeren | Kan op iedere snelheid getest worden en ieder kanaal kan getest worden tijdens bedrijf (online) |
| Vereist meerdere opstarts van de turbine om de tripwaarde zo nauwkeurig mogelijk in te stellen | Heeft geen extra turbine opstarts nodig |
Het overstappen naar elektronische overspeedbewaking is niet complex. Bij het upgraden wordt de mechanische trip-hendel en alle bijbehorende systeemonderdelen verwijderd. Indien niet aanwezig wordt er een meetoppervlak (tandwiel) op de as gemonteerd, waarna er een of meer sensoren rondom dit meetoppervlak worden geplaatst. Het bewakingssysteem kan vervolgens bij de machine of in een cabinet worden geplaatst.
Leer meer over overspeed bewakingssystemen:
Wat zegt de API Standard 670 over overspeed-bewakingssystemen »

SpeedSys 300 – Overspeed bewakingssysteem
De SpeedSys 300 is een SIL 3 gecertificeerd electronisch overspeed bewakingssysteem voor roterende machines. Het biedt de kern van bewaking in een compacte architectuur. De lage technische impact maakt gemakkelijke retrofitting mogelijk en breidt daarmee de range van machines die bewaakt kunnen worden uit.

