De API Standard 670 is een industriestandaard en beschrijft de minimale eisen voor een machinebewakingssysteem (MPS) voor het meten van onder meer radiale as-vibratie, lagerhuis-vibratie, axiale as-positie, as-rotatiesnelheid, zuigerstang-daling, fase-referentie, overspeed en kritische machine temperaturen.
De standaard omvat de eisen met betrekking tot hardware (sensoren en systemen), installatie, documentatie en testen. In dit artikel richten we ons alleen op het onderdeel overspeed uit de API 670 en beperken we ons tot deze standaard. We beschrijven de belangrijkste elementen.
De definitie van overspeed
Er is sprake van overspeed wanneer de rotatiesnelheid van een roterende machine, zoals een stoom- of gasturbine, zijn ontwerplimieten overschrijdt. De gevolgen van een overspeed-situatie variëren per type machine en per model. Tevens is de tijd dat de overspeed-situatie duurt en de mate van snelheidsoverschrijding ten opzichte van het ontwerplimiet bepalend voor de gevolgen.
Hoewel fabrikanten de machines in het ontwerp doorgaans een zekere veiligheidsmarge meegeven ten aanzien van overschrijding van de maximale rotatiesnelheid, kan een overspeed situatie leiden tot snelle en impactvolle schadeontwikkeling. Om dit te voorkomen is het daarom belangrijk de machine uit te rusten met een overspeed-bewakingssysteem.
Dit artikel gaat hieronder verder
Wil je meer weten over overspeed en speedmetingen?
Vraag kosteloos het bookazine Speed aan »
Let op: vanwege de beperkte oplage raden we je aan het bookazine nu alvast aan te vragen!
Elektronische overspeed bewaking
In het verleden werden machines bewaakt door middel van mechanische overspeedbewaking, maar tegenwoordig is elektronische overspeedbewaking de standaard. De API 670 omschrijft daarom alleen nog de eisen van elektronische bewakingssystemen en definieert deze als volgt:
Een elektronisch overspeed-bewakingssysteem bestaat uit speedsensoren, voedingen, output, uitgangsrelais, signaalverwerker en alarm/trip logica. De functie is om continu de rotatiesnelheid van de as te meten en om het relais te activeren wanneer overspeed wordt gedetecteerd.
Separate hardware en logica
De API 670 beschrijft dat een elektronisch overspeed-bewakingssysteem uitsluitend toegewijd moet zijn aan overspeed-detectie. Het systeem dient geïsoleerd te zijn van andere bewaking- en monitoringssystemen en mag geen componenten delen. Hiermee wordt ervoor gezorgd dat het functioneren van het systeem verifieerbaar is en niet afhankelijk van andere systemen.
Reactiesnelheid
Een elektronisch overspeed-bewakingssysteem dient, voor de machines waar de API 670 standaard betrekking op heeft, uit drie onafhankelijke meetcircuits te bestaan. Om de veiligheid en beschikbaarheid van de machine te maximaliseren wordt gebruik gemaakt van een twee-uit-drie voting (2oo3) om de tripfunctie te activeren. In andere woorden, wanneer er minstens twee van de drie sensoren overspeed detecteren zal de tripfunctie wordt geactiveerd.
Voting is gerelateerd aan de architectuur van een tripsysteem (1oo2, 2oo2, 2oo3, enzovoorts). Het kan gedefinieerd worden als het minimale aantal ‘paden’ dat dient te werken van het totaal aantal paden die beschikbaar zijn binnen de architectuur. Zo dient er bij een 1oo2 architectuur minimaal één pad te werken, waar bij een 2oo4 architectuur minimaal twee paden dienen te werken.
Het is vanzelfsprekend dat de snelheid van schakelen bij een overspeed-situatie zeer belangrijk is. De API 670 beschrijft dat een systeem er maximaal 40 milliseconden over mag doen om overspeed te detecteren én de relaisuitgangen te laten schakelen. Hierbij wordt wel de opmerking gemaakt dat 40 milliseconden niet in alle gevallen snel genoeg is om te voorkomen dat de rotor door de ramp-up alsnog een snelheid haalt die boven zijn design-specificaties liggen.
Binnen deze 40 milliseconden dienen de volgende handelingen plaats te vinden:
- Alle drie de meetkringen (kanalen) meten de rotatiesnelheid.
- De gemeten waarden worden onafhankelijk van elkaar vergeleken met de ingestelde tripwaarde.
- Door middel van de votingstructuur wordt er bepaald hoeveel meetkringen een overspeed situatie hebben vastgesteld.
- Wanneer minimaal twee van de sensoren overspeed hebben gedetecteerd dient de output-relais te schakelen.
In het schema hieronder worden deze stappen schematisch samengevat:
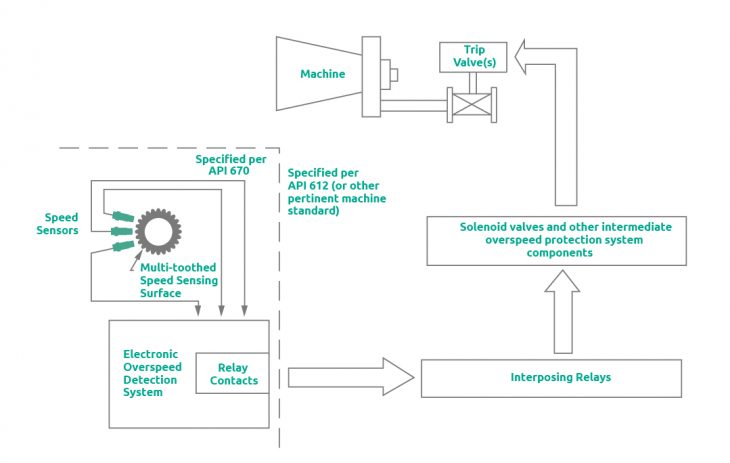
Schematische weergave van een afgebakend elektronisch overspeed-bewakingssysteem; drie sensoren die gericht zijn op het meetoppervlakte, gekoppeld aan het detectiesysteem waar de voting plaatsvindt met een relais als output.
Bron: API Standard 670

SpeedSys 300 – Overspeed bewakingssysteem
De SpeedSys 300 is een SIL 3 gecertificeerd overspeed bewakingssysteem voor roterende machines. Het biedt de kern van bewaking in een compacte architectuur. De lage technische impact maakt gemakkelijke retrofitting mogelijk en breidt daarmee de range van machines die bewaakt kunnen worden uit.

